
- 首頁(yè)
- 走進(jìn)科捷龍
- 產(chǎn)品中心
-
智能制造
-
致力于提供自動(dòng)化控制系統(tǒng)
與集成解決方案。 -
視頻案例
-
整廠(chǎng)設(shè)備集成
靈活定制——
智能制造領(lǐng)跑者。
-
整廠(chǎng)設(shè)備集成
- 新聞中心
-
人力資源
-
讓員工快樂(lè)工作,
讓團(tuán)隊(duì)高效運(yùn)轉(zhuǎn)
讓企業(yè)健康成長(zhǎng)。
-
讓員工快樂(lè)工作,
-
聯(lián)系我們
-
我們?nèi)娜猓?br>為廣大制造企業(yè),
提供一站式的優(yōu)質(zhì)服務(wù)。





















工業(yè)機(jī)器人和機(jī)械臂的區(qū)別
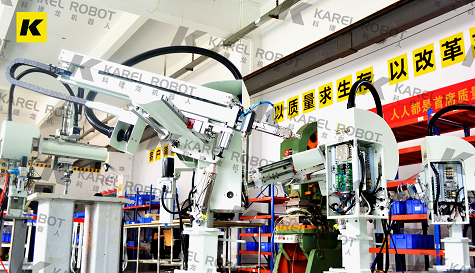
工業(yè)機(jī)器人
工業(yè)機(jī)器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置,它能自動(dòng)執(zhí)行工作,是靠自身動(dòng)力和控制能力來(lái)實(shí)現(xiàn)各種功能的一種機(jī)器。它可以接受人類(lèi)指揮,也可以按照預(yù)先編排的程序運(yùn)行,現(xiàn)代的工業(yè)機(jī)器人還可以根據(jù)人工智能技術(shù)制定的原則綱領(lǐng)行動(dòng)。
工業(yè)機(jī)器人由主體、驅(qū)動(dòng)系統(tǒng)和控制系統(tǒng)三個(gè)基本部分組成。主體即機(jī)座和執(zhí)行機(jī)構(gòu),包括臂部、腕部和手部,有的機(jī)器人還有行走機(jī)構(gòu)。大多數(shù)工業(yè)機(jī)器人有3至6個(gè)運(yùn)動(dòng)自由度,其中腕部通常有1至3個(gè)運(yùn)動(dòng)自由度;驅(qū)動(dòng)系統(tǒng)包括動(dòng)力裝置和傳動(dòng)機(jī)構(gòu),用以使執(zhí)行機(jī)構(gòu)產(chǎn)生相應(yīng)的動(dòng)作;控制系統(tǒng)是按照輸入的程序?qū)︱?qū)動(dòng)系統(tǒng)和執(zhí)行機(jī)構(gòu)發(fā)出指令信號(hào),并進(jìn)行控制。
機(jī)械臂
機(jī)械臂是指高精度,多輸入多輸出、高度非線(xiàn)性、強(qiáng)耦合的復(fù)雜系統(tǒng)。因其獨(dú)特的操作靈活性,已在工業(yè)裝配,安全防爆等領(lǐng)域得到廣泛應(yīng)用。
機(jī)械臂是一個(gè)復(fù)雜系統(tǒng),存在著參數(shù)攝動(dòng)、外界干擾及未建模動(dòng)態(tài)等不確定性。因而機(jī)械臂的建模模型也存在著不確定性,對(duì)于不同的任務(wù),需要規(guī)劃?rùn)C(jī)械臂關(guān)節(jié)空間的運(yùn)動(dòng)軌跡,從而級(jí)聯(lián)構(gòu)成末端位姿。
工業(yè)機(jī)器人和機(jī)械臂的區(qū)別
機(jī)械臂是機(jī)器人領(lǐng)域中使用最廣的一種機(jī)械裝置,廣泛應(yīng)用于工業(yè)、醫(yī)療甚至軍事、太空領(lǐng)域。機(jī)械臂分四軸五軸六軸多軸,3D/2D機(jī)器人,獨(dú)立機(jī)械臂、油壓機(jī)械臂等,雖然種類(lèi)很多,但它們有一個(gè)共同點(diǎn)就是能接收指令并精確定位到三維(或者二維)空間上的點(diǎn)進(jìn)行作業(yè)。
機(jī)器人與機(jī)械臂不同的是,機(jī)器人既可以接收人類(lèi)的指令,還可以按照人類(lèi)預(yù)先編排好程序執(zhí)行作業(yè),還可以根據(jù)人工智能指定的原則行動(dòng)。在未來(lái)機(jī)器人將更多地協(xié)助或取代人類(lèi)的工作,特別是一些重復(fù)性的工作,危險(xiǎn)的工作等。
歐美國(guó)家與日本對(duì)機(jī)器人的定義
歐美國(guó)家認(rèn)為機(jī)器人應(yīng)是由計(jì)算機(jī)控制,通過(guò)編程使得機(jī)器人成為多功能的自動(dòng)機(jī)械;日本則認(rèn)為機(jī)器人是高級(jí)的自動(dòng)機(jī)械,所以機(jī)械臂就被包含進(jìn)機(jī)器人的定義。
歐美國(guó)家認(rèn)為六軸及以上的機(jī)械臂可以稱(chēng)之為機(jī)器人,五軸及以下的只能叫機(jī)械臂;日本則把3軸機(jī)械臂定義為機(jī)器人。
現(xiàn)在國(guó)際上對(duì)機(jī)器人的概念已基本趨于一致,都認(rèn)為機(jī)器人是靠自身動(dòng)力和控制能力實(shí)現(xiàn)各種功能的一種自動(dòng)化機(jī)械。

機(jī)器人與機(jī)械臂在應(yīng)用范圍上的區(qū)別
機(jī)械臂在工業(yè)界應(yīng)用廣泛,其包含的主要技術(shù)是驅(qū)動(dòng)和控制,機(jī)械臂一般都是串聯(lián)結(jié)構(gòu)。
機(jī)器人主要分為串聯(lián)結(jié)構(gòu)與并聯(lián)結(jié)構(gòu):并聯(lián)機(jī)器人(PM)多用于需要高剛度、高精度、高速度,無(wú)需大空間的場(chǎng)合,具體應(yīng)用于分揀、搬運(yùn)、模擬運(yùn)動(dòng)、并聯(lián)機(jī)床、金屬切削加工、機(jī)器人關(guān)節(jié),航天器接口等;串聯(lián)機(jī)器人與并聯(lián)機(jī)器人在應(yīng)用上構(gòu)成互補(bǔ)關(guān)系,串聯(lián)機(jī)器人的工作空間大,可以避免驅(qū)動(dòng)軸之間的耦合效應(yīng)。但其機(jī)構(gòu)各軸要獨(dú)立控制,而且需要編碼器和傳感器來(lái)提高運(yùn)動(dòng)精準(zhǔn)度。
注明:文章內(nèi)容源于網(wǎng)絡(luò)
上一篇:
 科技創(chuàng)造未來(lái),工業(yè)機(jī)器人的應(yīng)用及發(fā)展趨勢(shì)
科技創(chuàng)造未來(lái),工業(yè)機(jī)器人的應(yīng)用及發(fā)展趨勢(shì)
下一篇:
 一次性可降解餐盒的類(lèi)型
一次性可降解餐盒的類(lèi)型
更多信息:
“以紙代塑”大幕拉開(kāi),你關(guān)心的問(wèn)題這里可能有答案 除了當(dāng)盤(pán)子,紙漿模塑制品還能這么用? 是使命也是機(jī)遇,紙模企業(yè)生產(chǎn)降耗問(wèn)題如何破?
- 服務(wù)熱線(xiàn): +86-760-88780533
- [email protected]
- 廣東省中山市石岐區(qū)民營(yíng)科技園民盈路8號(hào)

-
關(guān)注我們:
-


